计算机视觉
23年期末 21年期末 20年期末 20年软院期末 19年软院期末
计算机视觉
目标:让机器能够“理解”图像的内容:
- 图像的语义:识别
- 图像的三维:重建
图形经过建模,利用计算机图形学渲染(绘制)得到图像;
图像经过图像处理,利用计算机视觉得到图形。
Introduction
图像表示
程序中的图像表示
1 | struct MyImage |
访问像素
1 | img.type = CV_8UC3; // 8位无符号,3通道数据 |
遍历像素
1 | void scan_pixels(uchar *data, int width, int height, int step, int nc) |
Image Processing
像素灰度变换
亮度变换
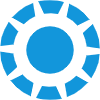
基本灰度变换函数
- Log Transformation:,为常数
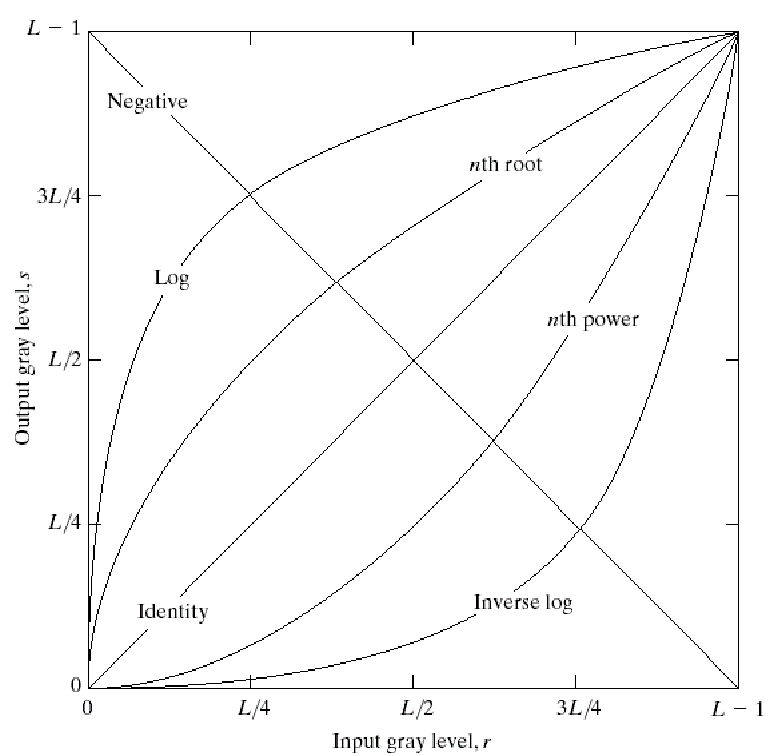
- Power-Law Transformations:,为正常数
- 变换函数取不同值下的图像
- 变换函数取不同值下的图像
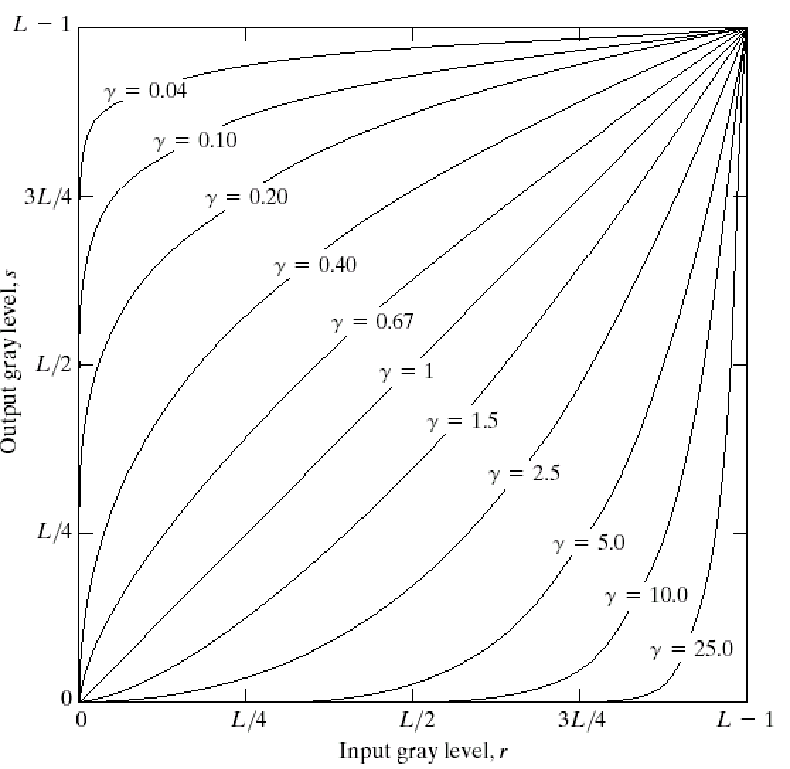
对比度变换
增加灰度的变化范围
- Quantize & Threshold 量化和阈值
- 分段函数
- sigmoid函数
代数运算:多幅图像
xor or and
alpha混合:
背景相减:两幅图像像素相减,差值大于某阈值的位置作为前景,即可恢复出前景。
基本几何处理
水平&垂直翻转 (flip)
1 | // 垂直翻转 |
缩放 (resize / zoom in /zoom out /scale)
实现方式:
- Projection (from source to target):对小图中的每个像素,计算其在大图中对应的像素,再拷贝小图的像素值到大图。
- 问题:大图中的某些像素可能无法得到填充
- Lookup (from target to source):对大图中的每个像素,计算其在小图中对应的像素,再拷贝小图的像素值到大图。
- 问题:计算得到的在小图中的位置不是整数
- 解决:
- 重采样Resampling
- 最近邻 (Nearest Neighbor)
x=int(x + 0.5), y=int(y + 0.5);
- 双线性插值 (Bilinear Interpolation)
- 两水平一垂直
1
2
3
4
5
6float bilinear(float a, float b, float c, float d, float dx, float dy)
{
float h1 = a + dx * (b - a); // = (1 - dx) * a + dx * b
float h2 = c + dx * (d - c);
return h1 + dy * (h2 - h1);
} - 两垂直一水平
1
2
3
4
5
6float bilinear(float a, float b, float c, float d, float dx, float dy)
{
float w1 = a + dy * (c - a); // = (1 - dy) * a + dy * c
float w2 = b + dy * (d - b);
return w1 + dx * (w2 - w1);
} - 两种方法等价
- 两水平一垂直
- 双三次插值 (Bicubic Interpolation)
- 最近邻 (Nearest Neighbor)
- 超分辨率Super-Resolution
- 重采样Resampling
变换矩阵
- 仿射变换
- 平移
- 缩放
- 旋转:左手系,顺时针旋转
- x切变
- y切变
- 平移
- 透视变换
仿射变换 (Affine Transform):线性变换+平移变换,在同一平面内变换
- 保持共线性、共线向量长度比、重心坐标
- 特殊的仿射变换
- 刚性变换(Rigid Transformation):
- 只包含平移和旋转
- 保持物体的形状(保角)和尺寸
- 相当于正交变换
- 相似变换(Similar Transformation):
- 只包含平移、旋转和等比缩放
- 保持物体的形状
- 刚性变换(Rigid Transformation):
透视变换(Perspective Transform):可表示不同视角观察到的同一平面,或同一视角观察到的不同平面之间的变换
仿射变换应用:图像匹配
不共线的3个平面点对决定一个二维仿射变换
超过3个点对
基于仿射变换的图像匹配
- 在第t帧检测特征点(特征检测)
- 计算特征点在第t+1帧的对应(特征跟踪)
- 根据特征点对估计第t帧到第t+1帧的仿射变换A
- 利用A对第t帧的图像进行变换,将变换的结果作为与第t+1帧配准的图像:
正向查找/逆向查找应用:图像变形 (Image Warping)
坐标归一化,获取原图中对应位置的像素
Spatial Filtering
空间域滤波器
- 线性滤波器:是线性函数
,为滤波核- 均值滤波器:
- 非线性滤波器:是非线性函数
- 最大值滤波器:
- 最小值滤波器:
- 中值滤波器
- 双边滤波
线性滤波器
- 平滑滤波器(Smoothing Filter)(低通滤波器)
- 原理:加权平均(均值滤波,高斯滤波)
- 边界处理
- 原因1:对边界附近的像素,滤波核的部分可能落在图像区域外。
- 原因2:如果不进行边界处理,不同像素点作为滤波核中心的次数不一样,有些点不会作为滤波核的中心出现
- 实现:
- 对边界外某个范围内的区域进行填充
- 常数填充
- 镜像填充(以边界为轴,取图像内对称点的像素值填充)
- 在边界附近调整滤波核的大小
- 对边界外某个范围内的区域进行填充
- 快速均值滤波
- 积分图:图像I的积分图S是与其大小相同的图像,S的每一像素S(u,v)存贮的是I(u,v)左上角所有像素的颜色值之和。(二维前缀和)
-
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18void integral_image(const uchar *src, int width, int height, int sstride, int *pint, int istride)
{
int *prow = new int[width];
memset(prow, 0, sizeof(int)*width);
for(int yi = 0; yi < height; ++yi, src += sstride, pint += istride)
{
prow[0] += src[0]; pint[0] = prow[0]; // for the first pixel
for(int xi = 1; xi < width; ++xi)
{
prow[xi] += src[xi];
pint[xi] = pint[xi - 1] + prow[xi];
}
}
delete[]prow;
}
- 高斯滤波
- 以高斯函数为滤波核
- 高斯滤波具有行列可分离性,核大小为M的二维图像高斯滤波,等价于同样核大小的一维高斯滤波在行列方向的叠加。所以在对二维图像进行高斯滤波时,为了减少运算时间,可以将行列单独进行滤波后叠加,将二维滤波转化为两个一维滤波。
- 越大,核就应该越大,
- 锐化滤波器(Sharpening Filter)(高通滤波器)
- 基本高通滤波器
- 滤波器在中心有正系数,而在边缘上有负系数,且总和为0
- 在平坦变化的区域很暗,在剧烈变化的区域很亮
- 可以用来边缘检测,滤波之后,只有边缘区域是亮的
- 导数滤波器
- 一阶导:
- 零:在数值不变的区域
- 非零:在数值变化的区域
- 二阶导:
- 零:数值均匀变化的区域
- 非零:数值剧变的区域
- 二阶导在边缘处过零点,可以简单确定边缘。但二阶导对噪声敏感,因此需要先进行高斯滤波去噪
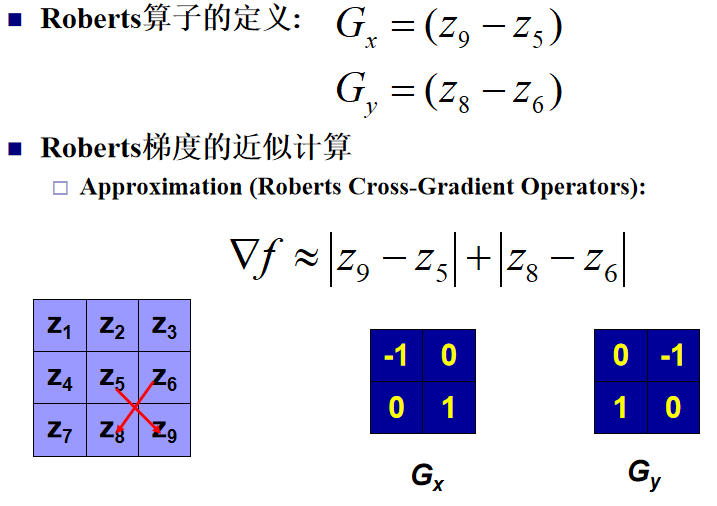
- 一阶导的运用:梯度
- 图像处理中最常见的差分方法就是梯度,梯度就是一个向量,指向灰度变化最大的方向,其长度为:
- Roberts算子
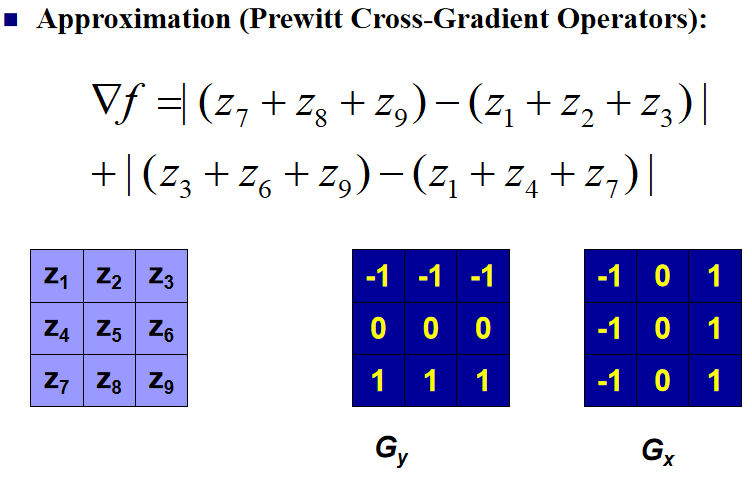
- Prewitt算子
- Sobel算子
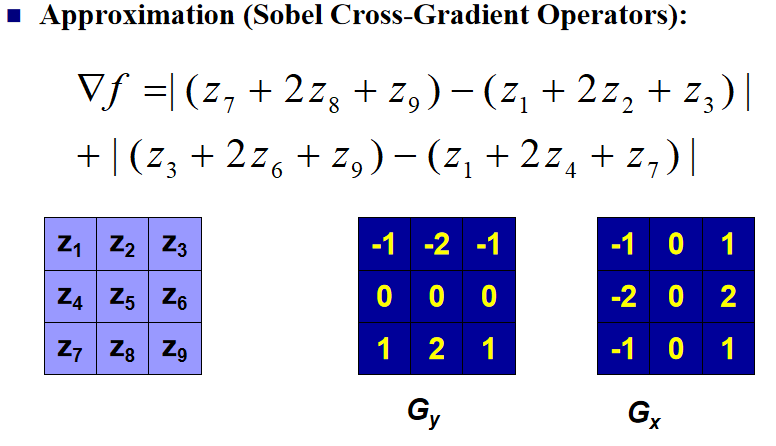
Sobel算子优点:Sobel算子跟高斯核相似,在中间的像素有较大权重,在两侧的像素的权重较小,对于噪声的抗干扰能力比较强,可以有效地去除一些小的噪点。Sobel算子的计算量比较小,处理速度比较快。Sobel算子的检测结果比较清晰,边缘位置比较精准。
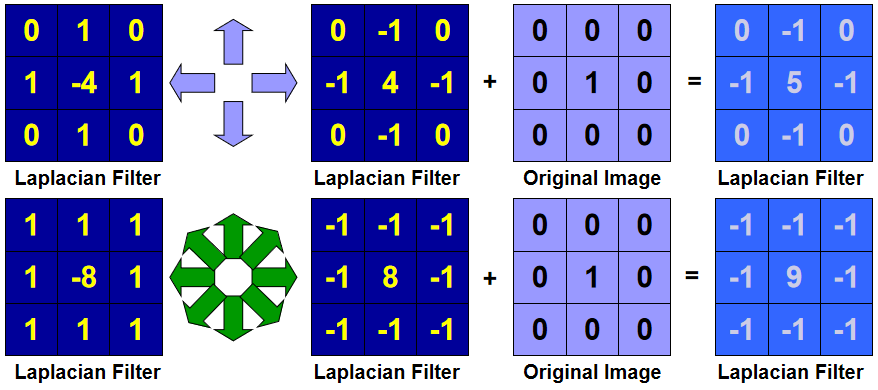
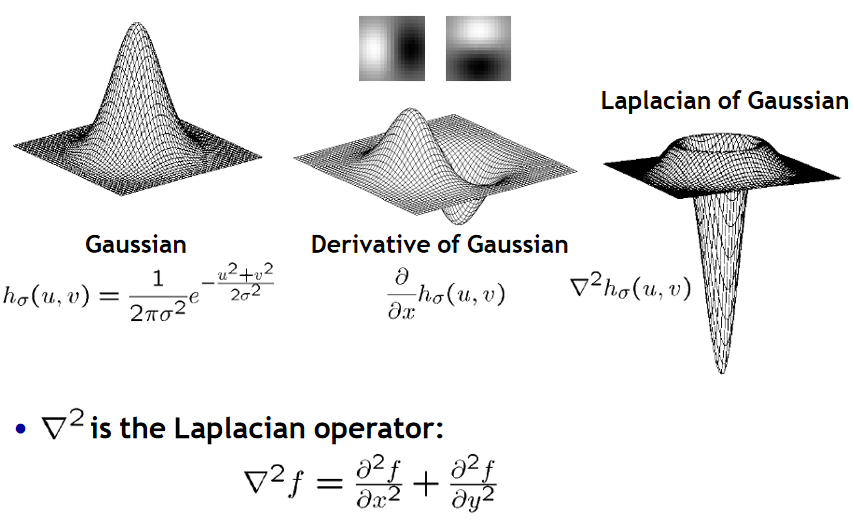
- 二阶导的运用:拉普拉斯
- Laplacian定义为x,y方向上的二阶导的和:,离散表示:
- 拉普拉斯滤波核可以中间是正数周围是负数,也可以中间是负数周围是正数
- 可以通过将拉普拉斯检测出来的图像加上原图像来锐化原图像
- 高斯拉普拉斯算子(Laplacian of Gaussian,LoG):高斯函数的二阶导(先高斯滤波再求导等价于先对高斯函数求导再滤波)
- 一阶导:
- 基本高通滤波器
图像的线性滤波是对图像的线性变换,可以表示成对图像的矩阵变换形式
非线性滤波器
次序统计滤波器(Order Statistics Filters)
- 中值滤波器:取邻域中灰度的中值作为该点的灰度值
- 尺寸越大图像越模糊
- 可用于消除椒盐噪声
- 最大值滤波器
- 最小值滤波器
- 快速最大/最小值滤波
- 每次选取一个区域M,将M的中间位置当作c
- 对位置i来说,若i在c左边,则位置i的值为从i到c的最大/最小值;若i在c右边,则位置i的值为从c到i的最大/最小值
- 由2得到一个序列T,T从c往左往右都是单调不减/增的
- 求一个范围内的最大/最小值,只需要比较该范围的左右端点即可
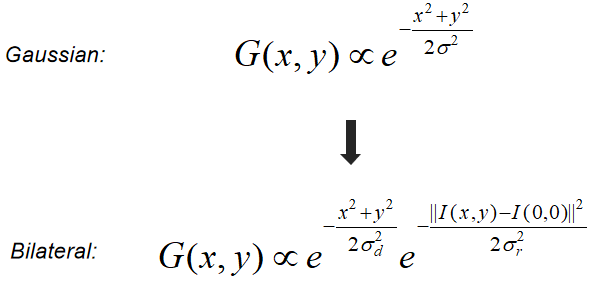
双边滤波器
高斯滤波的问题:消除噪音的同时也使边缘变得模糊。因为高斯滤波在滤波过程中只关注了位置信息,即在滤波窗口内,距离中心点越近的点权重越大。这在像素值出现剧变的边缘区域,会损失有用的边缘信息。
双边滤波:计算权重时同时考虑空间位置和像素颜色之差,在高斯滤波的基础上加入了像素值权重项。在图像的平坦区域,像素值变化很小,对应的像素范围域权重接近于1,此时空间域权重起主要作用,相当于进行高斯模糊;在图像的边缘区域,像素值变化很大,像素范围域权重变大,从而保持了边缘的信息。
Matching
特征检测
目标:稳定检测;易于匹配
挑战:对图像几何变换的稳定性;对颜色、光照变化的稳定性
角点检测(Corner Detection)
角点:在任意方向像素颜色都会有明显变化。等价于:在角点附近,图像梯度具有至少两个主方向。
Harris角点检测
将图像区域内的一个窗口进行小位移移动,观察窗口内的像素变化,用以下公式来衡量像素的变化:,是窗口的权重函数(可以是高斯函数,也可以全部设置为1),是移动后的像素值,是移动前的像素值。将项泰勒展开,再将平方项展开写成矩阵形式,经过一系列推导,可以将写成以下形式:
这也是椭圆的矩阵表示形式,假设的特征值为,那么分为以下三种情况:
- 都很小,且二者比值近似,说明在各个方向上几乎都没有变化,这表示图像中的平面
- 一大一小,且二者相差较大,这表示图像中的边缘
- 都很大,且二者比值近似,说明在各个方向上都有变化,这表示图像中的角点
为了简化计算,定义了响应函数,为响应值,角点的响应值较大,平坦区域的响应值较小,边缘的响应值为负数;为经验常数,通常为0.04~0.06。
得到角点之后进行非极大值抑制操作。
Harris对光照变化和几何变换的稳定性?
Harris具有旋转不变性和光照不变性,不具有尺度不变性
- 旋转不变性:图像旋转后,角点检测过程中得到了椭圆只是方向发生变化,但形状没变,响应函数R没变,故具有旋转不变性
- 不具有尺度不变性:尺度变化会将角点变成边缘
- 光照不变性:整体光照改变了像素值的大小,不改变梯度
斑点检测(Blob Detection)
利用图像的Hessian矩阵(图像某一点处的二阶导数),在两个正交方向上寻找强梯度。使用公式,结果:响应主要在角点和纹理比较强的区域。
如何实现尺度不变性?
分辨率越高,尺度越小;分辨率越低,尺度越大
高斯金字塔
高斯核是实现尺度变换的唯一核
通过降采样构建高斯金字塔。降采样前需要先对图像进行平滑以避免走样。
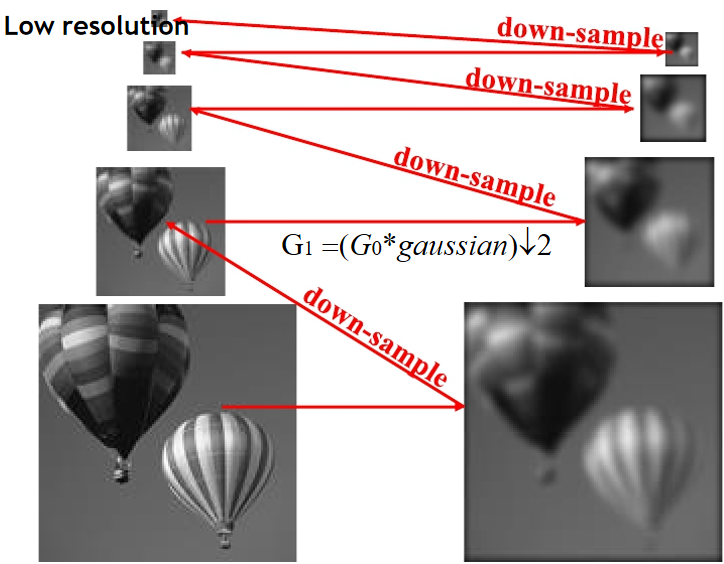
每一层都通过对前一层的平滑和下采样来得到
拉普拉斯金字塔
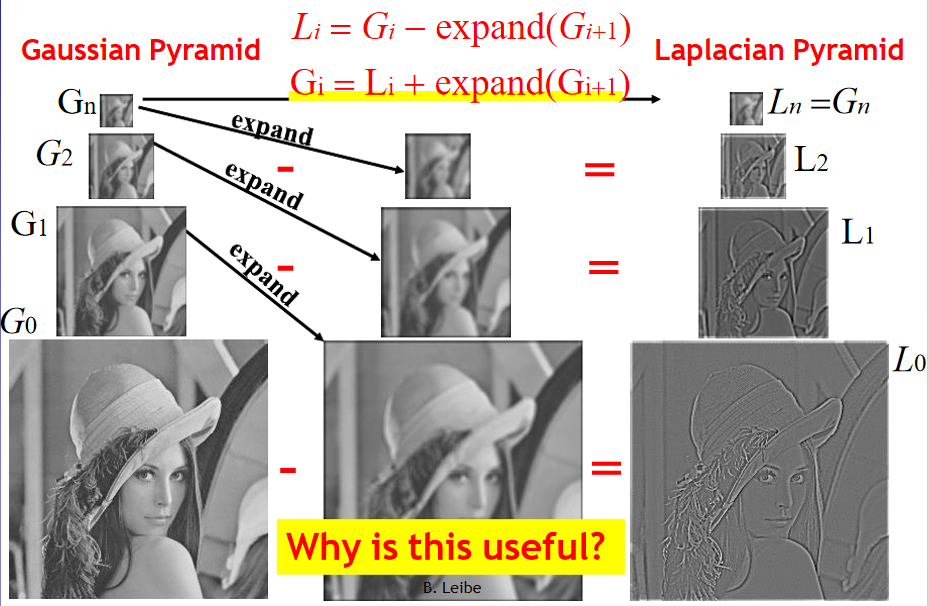
拉普拉斯金字塔可以看作是是对高斯的差分(Difference of Gaussian,DoG),拉普拉斯金字塔的第i层是高斯金字塔的第i层减去第i-1层的扩展(插值+滤波)得到的。
得到金字塔后,在不同尺度同时进行检测和匹配,就可以实现尺度不变性
实现:
- 穷举搜索:利用多个大小的窗口对图像进行扫描
- 缺点:
- 效率低
- 不利于识别
- 缺点:
- 自动尺寸选择
- 思想:设计一个尺度无关的函数。取函数的局部最大值,最大值对应的区域对于图像尺寸来说是不变的,最后归一化到固定尺寸
- 实现:使用LoG(LoG的与检测框的尺寸正相关,因此可以使用不同的LoG进行不同尺度的特征检测),然后记录LoG在尺度空间上的局部最大值对应的位置。实际使用时常用DoG来代替LoG,计算更方便。具体流程是:
- 在尺度空间上检测DoG的局部最大值
- 非极大值抑制
- 消除边缘响应(由于某些原因,在检测极值点时,边缘容易被检测出来)
特征匹配
将特征所在的局部图像块转化为向量表示的特征描述,然后进行匹配。
特征描述要具有不变性(对一张图片的两次检测结果应该相同)和区分性(不同特征之间应该是可区分的)。
特征匹配的方法:
- SSD (Sum of Square Difference):
- SAD (Sum of Absolute Difference):
- NCC (Normalized Cross Correlation):(两个向量点积)
- Census Transform:对图像块的二值编码,比中间像素小的视为0,比中间像素大的视为1,然后将两个二值序列异或,异或值越小则认为越相似。
- BRIEF
考虑对齐误差
以上方法都是对对应位置的像素进行计算,这样做的问题是一些微小的变动可能对匹配得分产生重大影响。因此需要统计整个图像块内的信息作为描述。
- SIFT(Scale Invariant Feature Transform)
- 流程:
- 构造DoG尺度空间
- 在各尺度上定位关键点
- 为关键点分配方向角
- 形成特征描述符
- 描述符的计算:将一个区域分成的子区域块,对于每一块子区域计算梯度方向直方图(8个参考角度),总共维。
- 流程:
- PCA-SIFT
- 对SIFT的描述符计算进行了改进
- SURF(Speeded Up Robust Features)
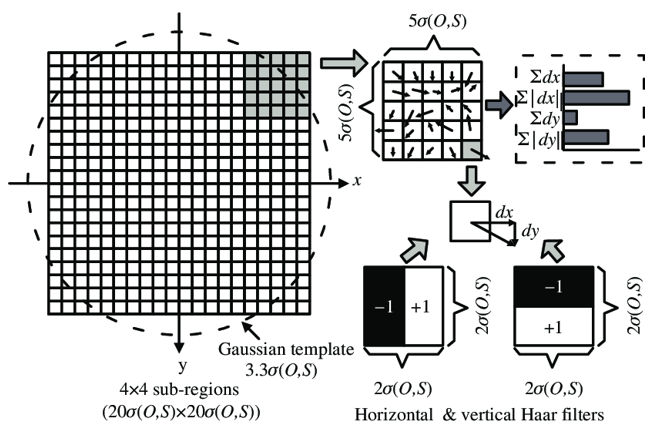
- 在特征点周围取一个矩形区域块,但是取的矩形方向是沿着特征点的主方向。每个子区域统计25个像素的水平方向和垂直方向的Haar小波特征,这里的水平方向和垂直方向都是相对主方向而言的。该Haar小波特征为水平方向值之和、垂直方向值之和、水平方向绝对值之和、垂直方向绝对值之和。总共维
- Haar特征(哈尔特征):本例中使用Haar特征的两个模板。模板是矩形框,由黑色部分和白色部分构成。使用方法为:利用白色部分像素和减去黑色部分像素和。Haar特征反映了图像的灰度变化情况
- Haar特征在灰度分布均匀的区域特征值趋近于0
- 在特征点周围取一个矩形区域块,但是取的矩形方向是沿着特征点的主方向。每个子区域统计25个像素的水平方向和垂直方向的Haar小波特征,这里的水平方向和垂直方向都是相对主方向而言的。该Haar小波特征为水平方向值之和、垂直方向值之和、水平方向绝对值之和、垂直方向绝对值之和。总共维
如何实现旋转不变性?
以图像块中的主方向作为定位(统计图像块中像素的梯度,哪个梯度方向的像素最多就作为主方向),通过主方向对图像快进行旋转,这将使图像块旋转到一个规定的方向。
- SIFT主方向选择:基于梯度直方图的主方向和特征描述
- 统计梯度直方图
- 选择最显著的梯度方向
- 归一化:将图像旋转到指定方向
- SURF主方向选择:基于小波梯度的主方向和特征描述
- 统计特征点圆形邻域内的Harr小波特征。即在特征点的圆形邻域内统计扇形内的所有水平、垂直Harr小波特征总和,然后扇形以0.2弧度大小的间隔进行旋转并再次统计该区域内的小波特征,最后将值最大的扇形的方向作为该特征点的主方向。
- ORB(Orented-FAST and Rotated BRIEF)主方向选择:基于亮度质心的主方向+基于BRIEF的特征描述
- 亮度质心的计算同时考虑了像素位置和像素值大小
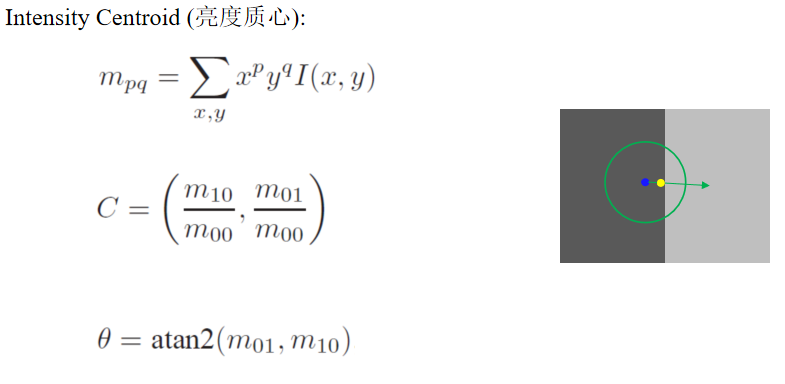
- 亮度质心的计算同时考虑了像素位置和像素值大小
特征匹配:向量搜索
- BruteForce
- Hash-based
- Local Sensitive Hash (LSH)
- Tree-based
- Approximate Nearest Neighbor (ANN)
- FLANN library
特征匹配的基本原理
- 尺度不变
- 旋转不变
- 光照不变
- 对齐误差
全局特征表示:对图像或者目标的整体进行编码表示,主要面向高层语义相关的任务,如识别、检测、检索等。
- 颜色直方图:
- 统计图像的颜色直方图,并将直方图作为图像的特征表示
- 缺点:只能表达图像的整体颜色分布,不能表示语义信息。
- 梯度方向直方图(Histogram of Oriented Gradients, HoG)
- 将图像均匀划分成 像素的区域,并计算每个区域内的梯度方向分布。将所有区域的梯度方向直方图连接为一个向量作为图像的特征表示
- 缺点:利用了目标的形状信息,但是对形状变化敏感。
- 词袋模型(Bag of Words, BoW)
- 将目标表示为局部特征(字典单词)的分布
- 从训练集提取局部特征,并聚类获得字典
- 提取图像特征,并与字典中的特征进行匹配,计算分布直方图
- 优点:具有较强的语义表达能力;对目标的形变不敏感
- 缺点:丢失了局部特征的空间信息
- 将目标表示为局部特征(字典单词)的分布
- DPM(deformable parts model)
- 局部可形变,兼有整体的空间关系约束
- 卷积神经网络
- 越靠后的卷积层,语义表达能力越强,可以将最后一层的输出作为图像的全局特征表示
局部特征表示:对局部图像块进行编码,是图像匹配、三维重建等的基础。
全局特征表示:对整幅图像进行编码,是图像识别、检索等的基础。
运动估计
忽略外点(Outlier):
- 齐次坐标和变换矩阵
-
仿射变换:线性变换+平移,改变物体的位置和形状,但保持平直性
常见的变换矩阵:平移、缩放、旋转、x切变,y切变(前文有提到)
不共线的三个平面点对确定一个二维仿射变换;大于三个点对可以通过优化的方式估计 -
特殊仿射变换
-
相似变换:只包含平移、旋转、缩放,保持物体的形状
-
刚性变换:只包含平移和旋转,保持物体的形状(保角)和尺寸。相当于正交变换。
- 如何求解:非线性最小二乘
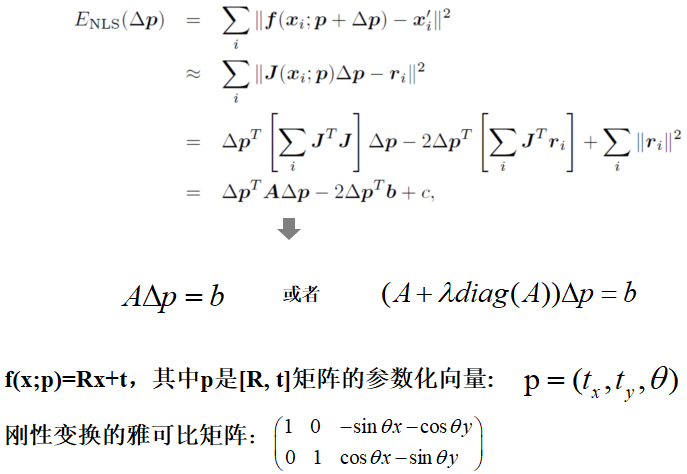
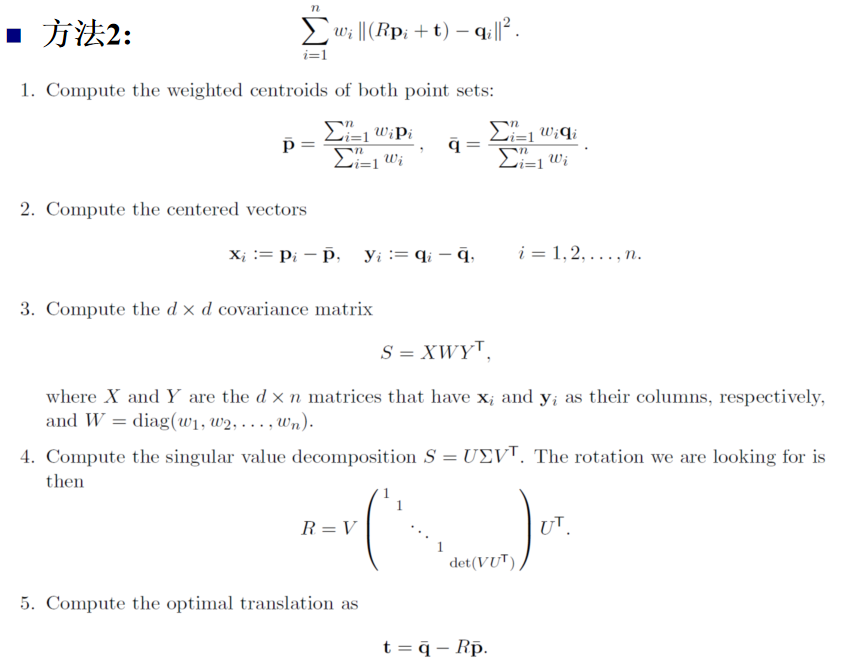
- 如何求解:非线性最小二乘
-
-
透视变换
- 平面到平面的保持直线性的映射
- 任意一个 可逆矩阵都是透视变换
- 任意透视变换都可表示为 可逆矩阵
- 中心投影对应的平面映射是透视变换
- 场景(三维)中任意平面到图像平面的映射
- 场景中同一平面在不同视点下图像之间的对应点的映射
- 旋转相机在不同角度得到的图像之间的映射
-
透视变换估计
8个参数,最少需要4个点对
- 非线性最小二乘
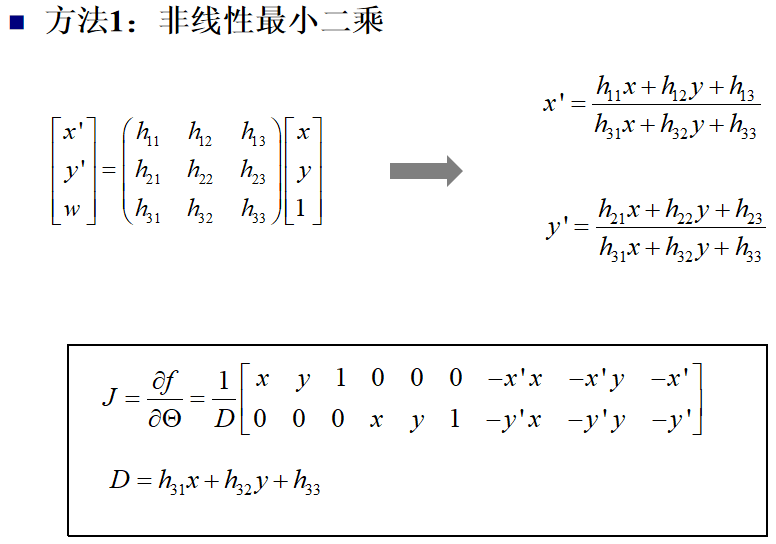
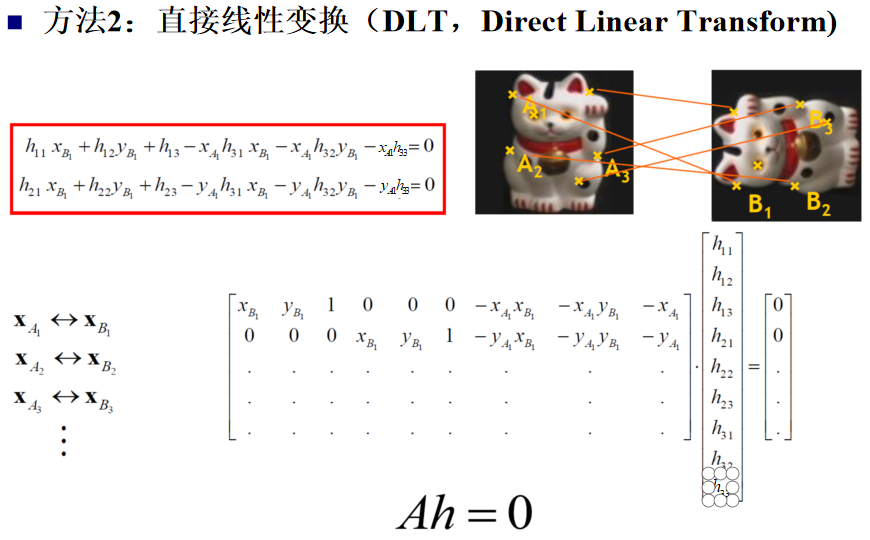
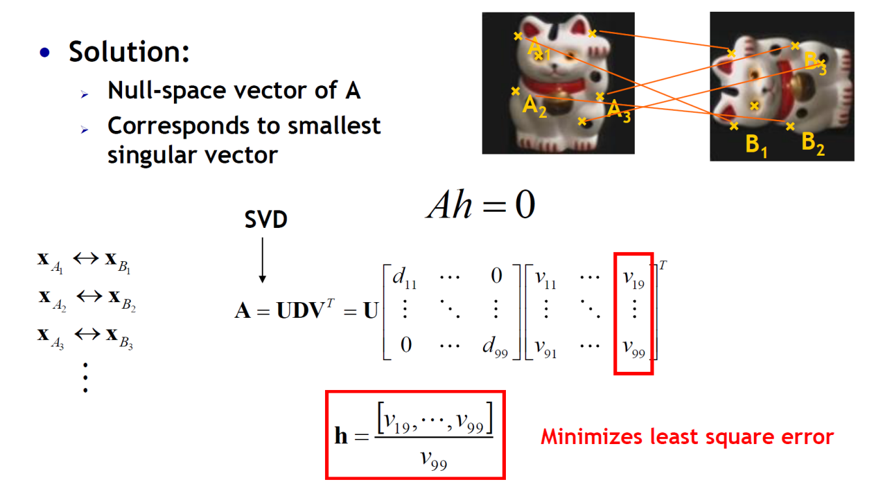
- 直接线性变换
- 非线性最小二乘
-
考虑外点:
-
RANSAC(RANdom SAmple Consensus)
RANSAC,随机抽样一致算法。是一种在包含离群点在内的数据集里,通过迭代的方式估计模型的参数的方法。有一定概率得到一个合理的结果。
思路:规避外点的影响,只使用内点。如果一个离群点被选择来计算当前的拟合,那么这个结果对剩下的点就不会有很好的拟合结果。
流程:- 随机选择一组种子点(随机选取的点默认是内点)来进行基本的变换估计
- 利用这一组种子点计算变换公式(利用随机选择的局内点拟合一个模型)
- 找到符合这一变换公式的点,将其标注为内点
- 如果内点的数量足够大,那么重新通过所有内点重新计算上面得到的模型的最小二乘估计,来评估拟合出来的模型
- 如果当前模型的效果比当前最好模型的效果好,则更新最好模型,否则,抛弃,重新开始迭代。
需要多少次采样?
- w是内点的比例
- n个点能定义一个模型(直线需要2个)
- 进行了k次采样,每次取n个点
一次取样中,选出n个点全为内点的概率为,k次取样都没有全部取完n个内点的概率是。因此选择足够大k使其低于期望失败率。
总结:
- RANSAC将数据划分为内点和外点,并从内点的最小集合进行估计。
- 通过对所有内点的估计优化初始估计(例如标准的最小二乘法)。
- 但这可能会改变内点,因此会重新拟合并分类内点和外点。
问题:
- 离群点的比例可能很大(90%以上)
- 离群点的比例未知
Reconstruction
三维感知
- 单张图像:不准确
- 基于双目/多目:物体的深度值越大,在两幅图之间的视觉差越小。我们可以基于这个来判断物体在三维空间中的深度。
三角化(Triangulation)
通过两张图片对应点与相机所在直线,来确定三维空间中物体所在的位置。
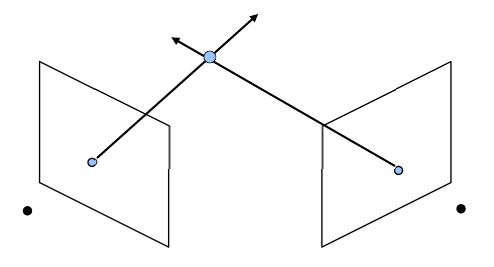
进行三角化时需要知道的信息:
- 外参:相机的位置、朝向
- 内参:焦距等参数
- 像素对应关系
针孔相机模型
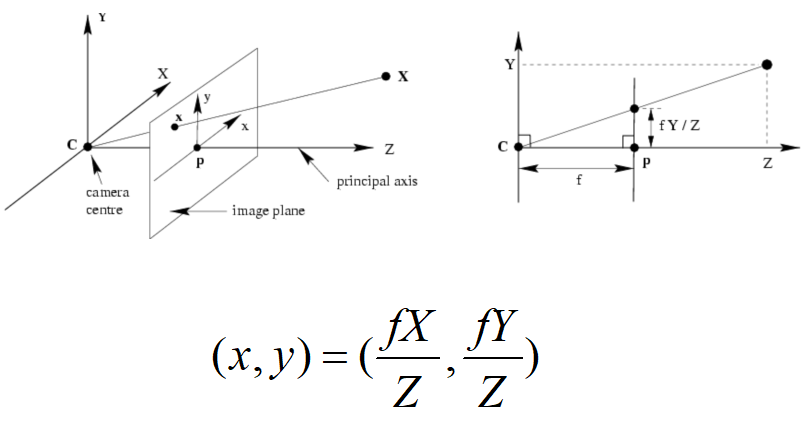
是成像面上成像点的坐标,是空间中的三维点的坐标,是成像面距离相机光心的距离。根据点在三维空间中的坐标计算出该点在屏幕上的坐标。矩阵形式的表达:
相机坐标系
- 主轴(Principal axis):从中心出发,与图像平面垂直
- 主点(Principal point):主轴与图像平面的交点,理想情况在图像中心
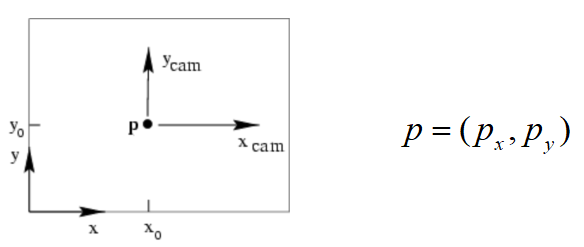
主点偏移
主点不在图像中心
像素长宽比
CCD单元长宽比不为1:pixel size:
像素不是矩形
CCD行与列不垂直
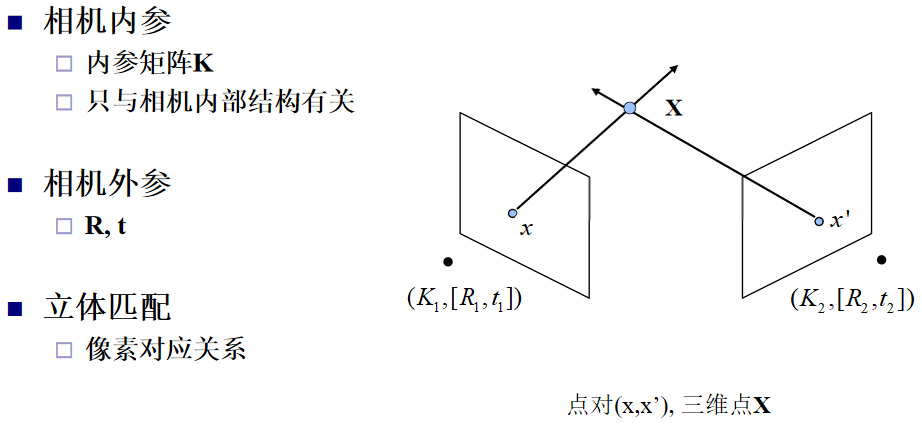
从相机坐标系的三维点到像素坐标的变换,为内参矩阵
若空间坐标系不与相机坐标系重合:
已知相机在世界坐标系中的位姿:
- 相机光心在世界坐标系的坐标为C
- 三坐标轴相对于世界坐标系的旋转为R(旋转矩阵)
相机投影矩阵:,是相机内参矩阵,是相机外参矩阵
由此,我们得到了三维重建的基本参数
运动推断结构(Structure from Motion,SFM)
- 运动:相机的运动
- 结构:场景的三维点云
- SFM:从相机运动获取场景的三维点云
如果运动已知,那么只需要图像匹配+三角化,然而相机运动和三维点云都未知。
极线几何
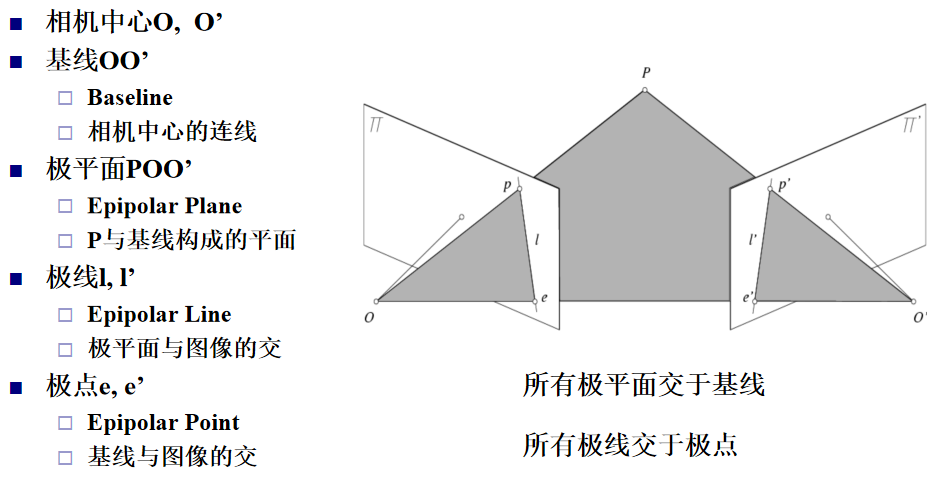
左视图点在右视图的对应点一定位于上
右视图点在左视图的对应点一定位于上
极线约束(Epipolar Constraint)
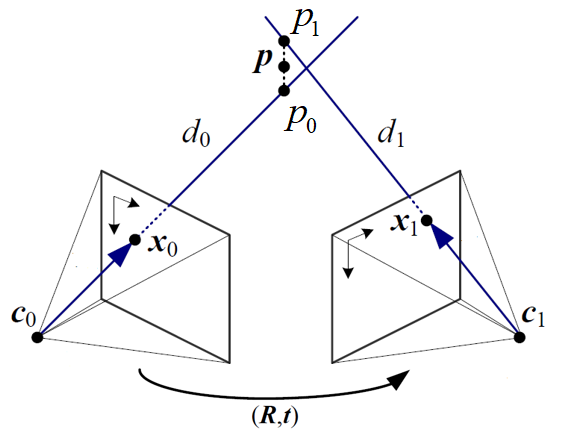
是成像面上的二维坐标是相机坐标系的空间坐标,因为,所以,然后归一化到单位长度,作为一个方向向量,其方向由相机光心指向该点
是深度,是未知的,是右边坐标系相对左边坐标系的变换参数。理论上来说会相交于一点,但由于相机分辨率以及噪声的存在,实际情况中可能不存在这样的交点,那么可以用公垂线的中点来代替点。
等式两边同时与做叉乘,即两边同时乘一个的叉积矩阵:
等式两边同时与做点积:
等式左侧,的结果是一个向量,其方向垂直于,再与做点积,结果是0,所以:
由此,我们得到了本质矩阵,由决定。如果已知本质矩阵的话,就能得到然后就能得到深度了。
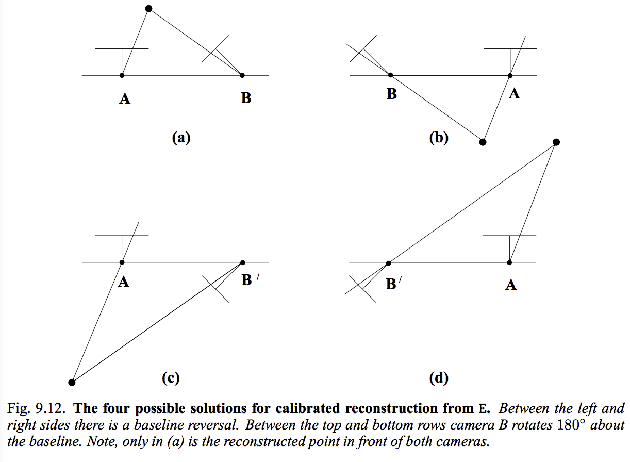
从到
任意本质矩阵都可以通过SVD分解为如下形式:
,相应的存在4种可能:,是的第3个(最小奇异值)奇异向量;
。
对于以上四种情况,只有(a)是符合实际情况的,所以对于四种可能的解,选取三维点在相机前方最多的解作为结果。
如何计算本质矩阵E
- 方法1:
基础矩阵基础矩阵
因为,所以一个对应的点对,就能得到一条方程,只要有足够的点对,就能得到基础矩阵,从而解得本质矩阵 - 方法2:
直接通过来估计本质矩阵,同样通过多个对应点对来估计。
二视图SFM:只能求出相机的相对位置和姿态;位移t只能得到方向
多视图SFM:二视图+融合的方法可能存在冲突,因为同一三维点可能在多个视图同时被观察到
为了使公式计算出的同一特征点对应的投影点尽量与ground truth一致,采用集束调整(Bundle Adjustment)的方法:
- 非线性最小二乘
- 使用二视图结果初始化
参考资料
https://blog.csdn.net/aqqqaqqq7/article/details/131291430
https://download.csdn.net/download/cax1165/14504375?utm_medium=distribute.pc_relevant_download.none-task-download-2~default~BlogCommendFromBaidu~Rate-7-14504375-download-12029569.257%5Ev16%5Epc_dl_relevant_base1_b&depth_1-utm_source=distribute.pc_relevant_download.none-task-download-2~default~BlogCommendFromBaidu~Rate-7-14504375-download-12029569.257%5Ev16%5Epc_dl_relevant_base1_b&spm=1003.2020.3001.6616.9
https://download.csdn.net/download/ding_programmer/12082141?utm_medium=distribute.pc_relevant_download.none-task-download-2~default~keyword~Rate-5-12082141-download-20347255.257%5Ev16%5Epc_dl_relevant_base1_b&depth_1-utm_source=distribute.pc_relevant_download.none-task-download-2~default~keyword~Rate-5-12082141-download-20347255.257%5Ev16%5Epc_dl_relevant_base1_b&spm=1003.2020.3001.6616.5
https://download.csdn.net/download/weixin_43460876/13240045?utm_medium=distribute.pc_relevant_download.none-task-download-2~default~BlogCommendFromBaidu~Rate-25-13240045-download-14504375.257%5Ev16%5Epc_dl_relevant_base1_b&depth_1-utm_source=distribute.pc_relevant_download.none-task-download-2~default~BlogCommendFromBaidu~Rate-25-13240045-download-14504375.257%5Ev16%5Epc_dl_relevant_base1_b&spm=1003.2020.3001.6616.25&ydreferer=aHR0cHM6Ly9kb3dubG9hZC5jc2RuLm5ldC9kb3dubG9hZC9jYXgxMTY1LzE0NTA0Mzc1P3V0bV9tZWRpdW09ZGlzdHJpYnV0ZS5wY19yZWxldmFudF9kb3dubG9hZC5ub25lLXRhc2stZG93bmxvYWQtMn5kZWZhdWx0fkJsb2dDb21tZW5kRnJvbUJhaWR1flJhdGUtNy0xNDUwNDM3NS1kb3dubG9hZC0xMjAyOTU2OS4yNTclNUV2MTYlNUVwY19kbF9yZWxldmFudF9iYXNlMV9iJmRlcHRoXzEtdXRtX3NvdXJjZT1kaXN0cmlidXRlLnBjX3JlbGV2YW50X2Rvd25sb2FkLm5vbmUtdGFzay1kb3dubG9hZC0yfmRlZmF1bHR%2BQmxvZ0NvbW1lbmRGcm9tQmFpZHV%2BUmF0ZS03LTE0NTA0Mzc1LWRvd25sb2FkLTEyMDI5NTY5LjI1NyU1RXYxNiU1RXBjX2RsX3JlbGV2YW50X2Jhc2UxX2Imc3BtPTEwMDMuMjAyMC4zMDAxLjY2MTYuOQ%3D%3D
https://download.csdn.net/download/qq_40422851/12029569?utm_medium=distribute.pc_relevant_download.none-task-download-2~default~BlogCommendFromBaidu~Rate-9-12029569-download-12082141.257%5Ev16%5Epc_dl_relevant_base1_b&depth_1-utm_source=distribute.pc_relevant_download.none-task-download-2~default~BlogCommendFromBaidu~Rate-9-12029569-download-12082141.257%5Ev16%5Epc_dl_relevant_base1_b&spm=1003.2020.3001.6616.9
https://blog.csdn.net/hujingshuang/article/details/46829627?spm=1001.2014.3001.5501