数字图像处理
目标:对图像进行相对底层的基本操作
Introduction
图像采样与量化:
- 采样:图像空间连续坐标的离散化,决定图像的空间分辨率。
- 量化:图像函数值(幅值)的数字化,决定图像的幅度(灰度级)分辨率。
图像表示
图像文件格式:
- Vector images(.ai,.eps,.ps,…):矢量图,放缩时不会走样和模糊,但难以获得。
- Bitmap(.bmp,.jpg,.png,.gif,…):位图,易于获得,但放缩时会走样和模糊。
- GIF(Graphics Interchange Format)
- 8位索引,最多可保存256种颜色
- 具有"抖动(dither)"选项:可以混合两种不同可用颜色的像素来创建另一种颜色的像素
- 可以动画;透明
- 小内存、高品质
- JPEG(Joint Photographic Experts Group)
- 16位,能够同时显示数百万种颜色而不会抖动
- 约60%的压缩设置实现质量和文件大小的最佳平衡
- PNG(Portable Network Graphics)
- BMP(Windows Bitmap)
- 简单未压缩
- 可以索引或不索引
- DIB(Device Independent Bitmap)/DDB(Device Dependent Bitmap)
- 矢量图通过光栅化(rasterize)得到位图
图像(位图)可以表示成在二维域上定义的函数 f(x,y),每一个元素称为像素(pixel)
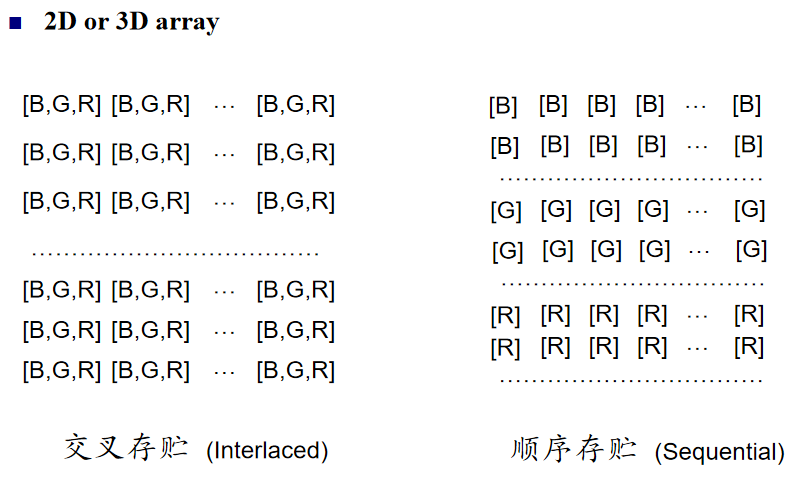
图像在内存中的表示:
本部分的其余内容可在“计算机视觉”的课程复习博客中的Introduction部分查看
Fundamental
本部分的内容可在“计算机视觉”的课程复习博客中的Image Processing部分查看
Spatial Filtering
本部分的内容可在“计算机视觉”的课程复习博客中的Spatial Filtering部分查看
Statistics
图像直方图是表示图像中灰度分布的直方图,描述了各个灰度上像素的数量关系。
以灰度级为x轴,像素数量为y轴,较暗的图像像素会集中在直方图的左侧;较亮的图像像素会集中在直方图的右侧;对比度低的图像像素会挤在直方图的中间;对比度高的图像像素会分散在直方图的各个灰度级上。
直方图均衡化
将灰度级 r 归一化到 [0,1]
灰度变换函数:sk=T(rk)=∑j=0knnj=∑j=0kpr(rj),n为总像素数,nj为灰度级为j的像素数,p(r)为概率密度函数。该公式表示将灰度为rk的像素变换到灰度sk上
全黑(0)图像直方图均衡化后为全白(255)图像;全白(255)图像直方图均衡化后还为全白(255)图像;一半黑一半白的图像直方图均衡化后,黑变灰(127.5),白不变
直方图应用
- 图像检索:使用每幅图像的直方图作为索引
- 目标跟踪:搜索图像,找到与前一帧目标区域的直方图最匹配的区域
- 图像分割:利用直方图模拟图像的前景和背景的颜色分布,分割出前景和背景
高斯混合和直方图:
- 都可以用于像素亮度/颜色分布的描述
- 优缺点(以交互式图像分割为例)
- 直方图对交互分割
- 优点:计算速度快,易于实现,能够捕捉到数据的整体分布。
- 缺点:无法捕捉到数据的局部特征,对异常值敏感,可能会出现数据过拟合现象。
- 高斯混合模型对交互分割
- 优点:可以捕捉到数据的局部特征,对异常值不敏感,具有较高的准确率。
- 缺点:计算量较大,需要手动确定高斯分布的个数,对初始化参数敏感,可能会出现局部最优解。
Structure
基于图的图像处理方法
图像可以被看作是一张图,每个像素为一个结点,像素之间根据邻接关系和颜色值等以边相连
- 连通域:同一连通域的任意两结点都能以路径相连
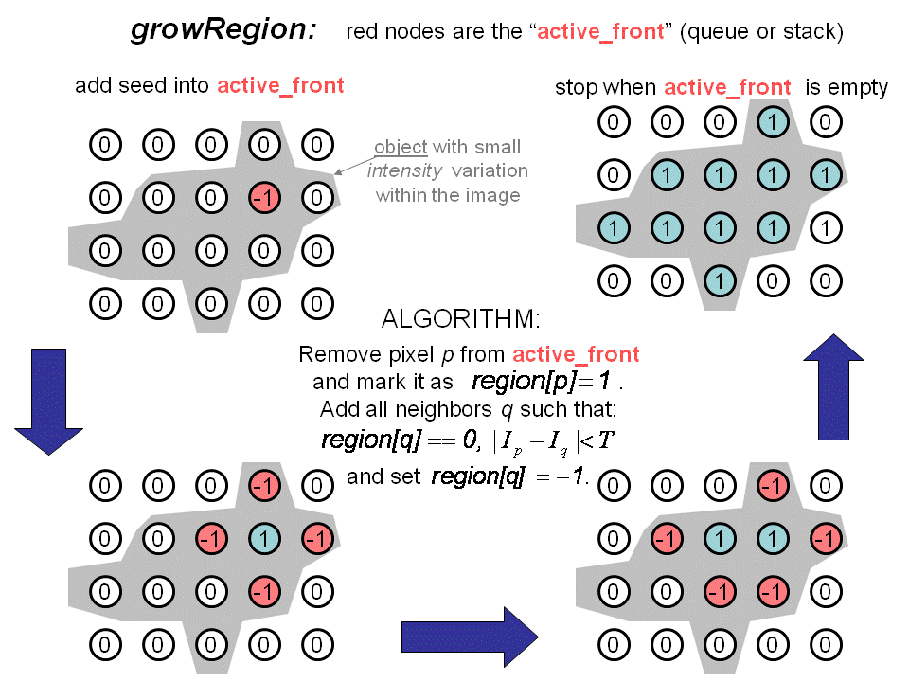
- 区域增长/种子填充:
- 快速连通域算法:一次扫描+合并等价类
- 最短路:
- 单源最短路:所有结点到某个结点的最短路
- 多源最短路:所有结点到某几个结点的最短路
- 再设置一个节点,连接该节点和几个目标结点,边权为0,求该节点的单源最短路
- 定义相邻像素之间的距离为其颜色差的函数,颜色差越大,距离越小:dij∝e−β∥Ii−Ij∥2
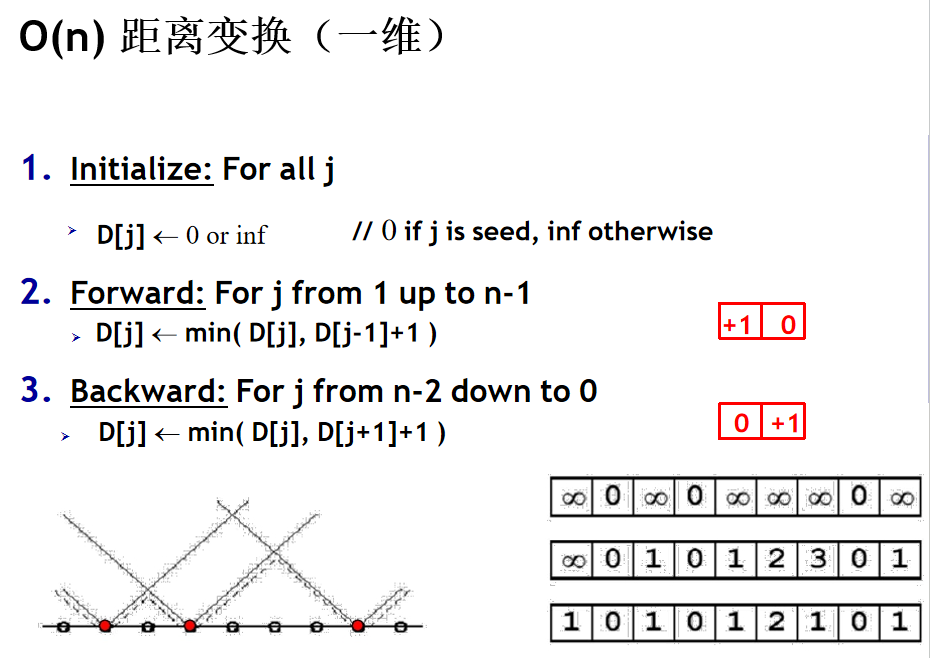
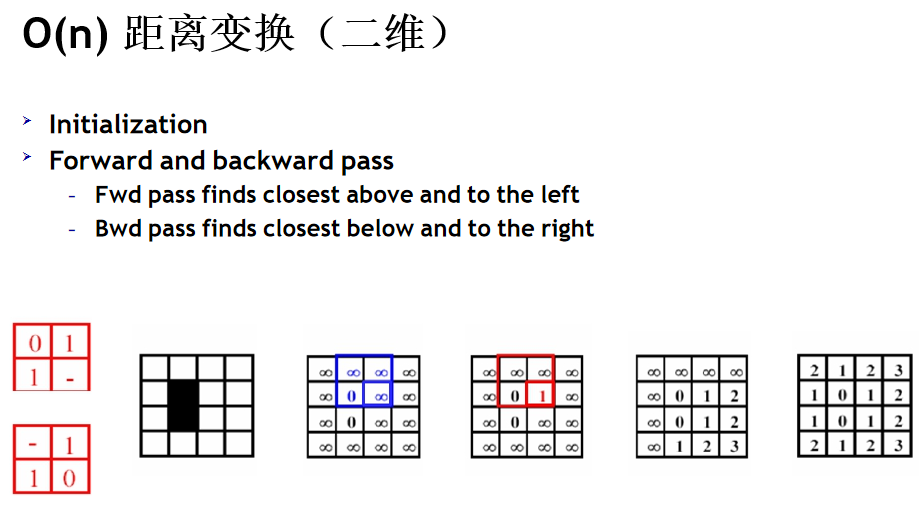
- 图像距离场:所有像素到种子像素的最短距离
- 图割和最小割
- 边的容量:每一条边允许通过的最大流量
- 图的切割:能将源和目标之间所有路径切断的图的剖分
- 最小割:所有图的切割中所切断的边的容量之和最小的一个,对应于网络流的瓶劲,即最大流
- 应用:图像分割,根据像素颜色建图,将源点和目标点分别设置在前景和背景上,通过求解最小割来得到最佳分割
形态学与二值图结构
形态学图像处理
- 膨胀:使图像扩大
- A 和 B 是 Z2 中的集合,A 被 B 膨胀定义为:A⊕B={z∣(B^)z∩A=∅} 上式表示 B 的反射进行平移与 A 的交集不为空。B 的反射:相对于自身原点的映象,B 的平移:对 B 的反射进行位移。也可以写成A⊕B={z∣(B^)z∩A⊆A}
- 腐蚀:使图像缩小
- A 和 B 是 Z2 中的集合,A 被 B 腐蚀定义为:A⊖B={z∣(B)z⊆A} 上式表示 B 进行平移后包含于 A
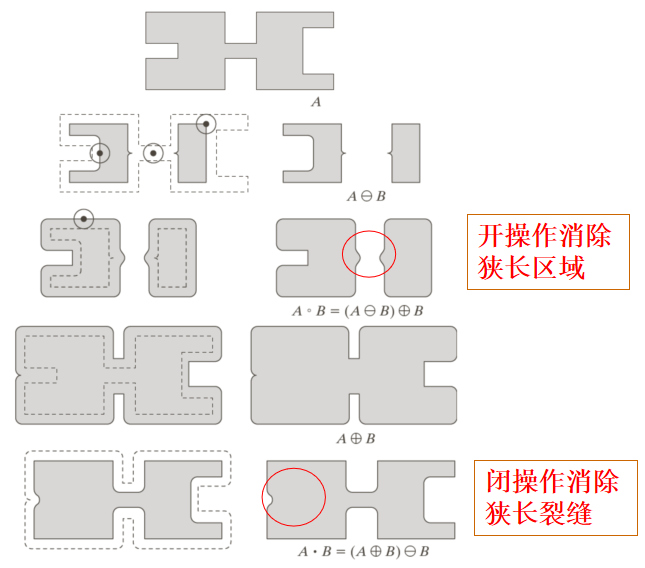
- 开操作:在不改变形状的前提下,使图像的轮廓变得光滑;断开狭窄的间断;消除细的突出物
- 使用结构元素 B 对集合 A 进行开操作,定义为A∘B=(A⊖B)⊕B 先用 B 对 A 腐蚀,然后用 B 对结果膨胀,另一个定义形:A∘B=∪{(B)z∣(B)z⊆A}
- 几何解释:B 在 A 的边界内转动时,B 中的点所能达到的 A 的边界的最远点
- 性质
- A∘B⊆A
- 若 C⊆D,则 C∘B⊆D∘B
- (A∘B)∘B=A∘B
- 闭操作:在不明显改变面积前提下,使图像的轮廓变得光滑;消除小的孔洞;消除狭窄的间断;细长的鸿沟;填补轮廓线中的裂痕
- 使用结构元素 B 对集合 A 进行闭操作,定义为:A∙B=(A⊕B)⊖B 先用 B 对 A 膨胀,然后用 B 对结果腐蚀
- 几何解释:B 在 A 的边界外侧转动时,B 中的点所能达到的离 A 的边界的最近点
- 性质
- A⊆A∙B
- 若 C⊆D,则 C∙B⊆D∙B
- (A∙B)∙B=A∙B
Frequency
频率(Frequency)即信号进行周期性变化的速率
图像的频率指图像亮度/颜色在水平/垂直方向上周期性变化的速率
傅里叶变换
图像从空间域到频率域的转换:
- 确定“某种频率”:选择一组具有特定频率的信号(信号的基),且通过这组信号的组合可以表示其它任何的信号
- 计算“频率的成分”:对任意的输入信号,以及某给定的基信号(频率已知),计算该基信号所占的成分(系数)
一维连续傅里叶变换:F(u)=∫x=−∞∞f(x)e−j2πuxdx
一维离散傅里叶变换:F(u)=M1∑x=0M−1f(x)e−j2πux/M,u=0,1,2,…,M−1
以上公式中,F(u)表示输入信号占基信号的成分,f(x)为输入信号,e−j2πux为基信号。
F(u)为什么表示输入信号占基信号的成分?
由欧拉公式 ejθ=cosθ+jsinθ,可得 F(u)=M1∑x=0M−1f(x)(cos2πux/M−jsin2πux/M)
先暂时忽略虚数部分,得:Freal(u)=M1∑x=0M−1f(x)cos2πux/M
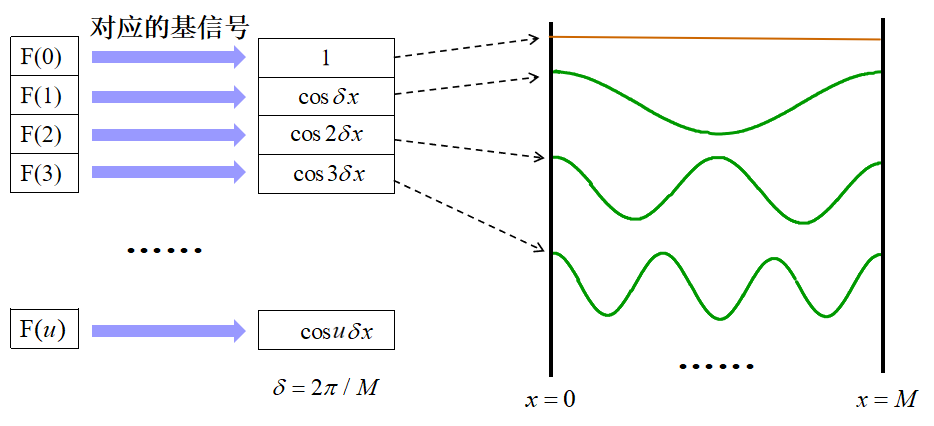
令f(x)=[f(0),f(1),f(2),…,f(M−1)],cosuδx=[1,cosδx,cos2δx,…,cos(M−1)δx],δ=M2π
则Freal(u)=M1f(x)⋅cosuδx
F(u)是原信号与基信号的内积,F(u)与原信号在基信号上投影的长度成正比,是原信号与基信号相似性的描述。傅里叶变换将原信号分解为基信号的组合,F(u)为组合的系数。
用这组基信号能否表示所有的其它信号?
傅里叶变换是矩阵(线性)变换
Freal(u)=M1∑x=0M−1f(x)cos2πux/M,u=0,1,2,…,M−1
M1⎣⎢⎢⎢⎢⎢⎢⎡111⋮11cosδxcos2δx⋮cos(M−1)δx1cos2δxcos4δx⋮cos2(M−1)δx⋯⋯⋯⋱⋯1cos(M−1)δxcos2(M−1)δx⋮cos(M−1)2δx⎦⎥⎥⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎢⎢⎡f(0)f(1)f(2)⋮f(M−1)⎦⎥⎥⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎢⎢⎡F(0)F(1)F(2)⋮F(M−1)⎦⎥⎥⎥⎥⎥⎥⎤
∵1,cosx,sinx,cos2x,sin2x,…,cosnx,sinnx,… 任意两个不同函数之积在[0,2π]内积分为 0
∴ 它们在[0,2π]内相互正交
∴ 它们是[0,2π]区间所有函数的一组基,其他函数都可以表示为这组函数的线性组合
∴ 用这一组基信号可以表示所有其他信号
为什么是复函数?
F(u)=M1x=0∑M−1f(x)e−j2πux/M=M1x=0∑M−1f(x)(cos2πux/M−jsin2πux/M)=M1f(x)⋅(cos2πux/M−jsin2πux/M)
cos2πux/M 和 sin2πux/M 的频率相同,但相位不同。引入复数变换的目的是为了刻画信号的相位。
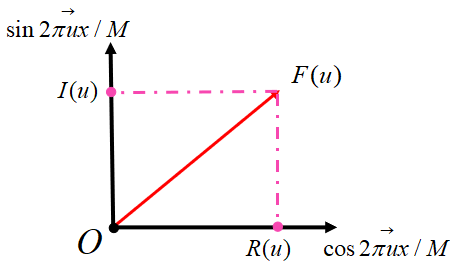
R(u)=M1f(x)⋅cos2πux/M,I(u)=−M1f(x)⋅sin2πux/M
F(u)=R(u)+jI(u)
幅度(magnitude):∣F(u)∣=[R2(u)+I2(u)]1/2
相角(phase angle):ϕ(u)=arctan[R(u)I(u)]
傅里叶逆变换
一维连续傅里叶变换
- 正向:F(u)=∫x=−∞∞f(x)e−j2πuxdx
- 逆向:f(x)=∫x=−∞∞F(u)ej2πuxdu
一维离散傅里叶变换
- 正向:F(u)=M1∑x=0M−1f(x)e−j2πux/M,u=0,1,2,…,M−1
- 逆向:f(x)=∑x=0M−1F(u)ej2πux/M,u=0,1,2,…,M−1
为什么逆变换是这种形式?
∵ 傅里叶变换是矩阵(线性)变换,傅里叶基是正交基
∴ 逆变换即求矩阵的逆
F(u)=M1∑x=0M−1f(x)(cos2πux/M−jsin2πux/M)
F=⎣⎢⎢⎢⎢⎢⎢⎡111⋮11cosδx−jsinδxcos2δx−jsin2δx⋮cos(M−1)δx−jsin(M−1)δx1cos2δx−jsin2δxcos4δx−jsin4δx⋮cos2(M−1)δx−jsin2(M−1)δx⋯⋯⋯⋱⋯1cos(M−1)δx−jsin(M−1)δxcos2(M−1)δx−jsin2(M−1)δx⋮cos(M−1)2δx−jsin(M−1)2δx⎦⎥⎥⎥⎥⎥⎥⎤
F−1=M1F∗,F∗ 是 F 的共轭转置
F−1=M1⎣⎢⎢⎢⎢⎢⎢⎡111⋮11cosδx+jsinδxcos2δx+jsin2δx⋮cos(M−1)δx+jsin(M−1)δx1cos2δx+jsin2δxcos4δx+jsin4δx⋮cos2(M−1)δx+jsin2(M−1)δx⋯⋯⋯⋱⋯1cos(M−1)δx+jsin(M−1)δxcos2(M−1)δx+jsin2(M−1)δx⋮cos(M−1)2δx+jsin(M−1)2δx⎦⎥⎥⎥⎥⎥⎥⎤
∴ 一维离散傅里叶变换可以写成
- 正向:F(u)=α∑x=0M−1f(x)e−j2πux/M
- 逆向:f(x)=β∑x=0M−1F(u)ej2πux/M
- αβ=M1
二维离散傅里叶变换
- 正向:F(u,v)=MN1∑x=0M−1∑y=0N−1f(x,y)e−j2π(ux/M+vy/N)
- 逆向:f(x,y)=∑u=0M−1∑v=0N−1F(u,v)ej2π(ux/M+vy/N)
- 行列可分离
傅里叶频率图像的移中
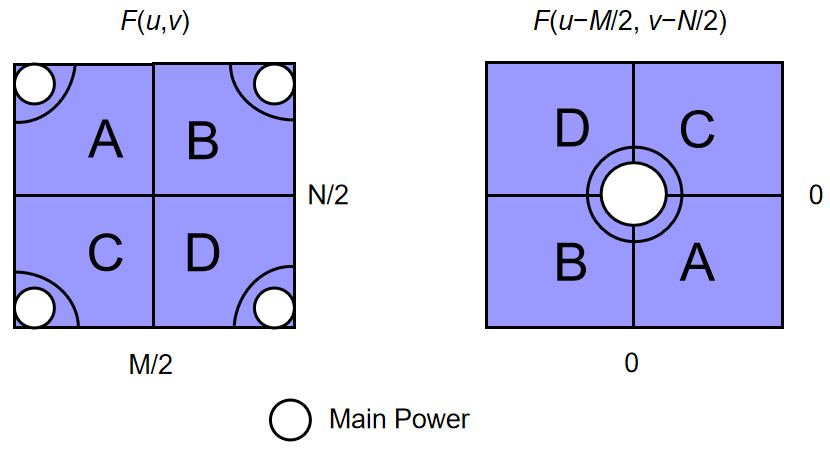
给输入信号 f(x,y) 乘上 (−1)(x+y),再进行傅里叶变换,可以将F(0,0)移到F(M/2,N/2)
====MN1x=0∑M−1y=0∑N−1f(x,y)(−1)x+ye−j2π(ux/M+vy/N)MN1x=0∑M−1y=0∑N−1f(x,y)ejπ(x+y)e−j2π(ux/M+vy/N)MN1x=0∑M−1y=0∑N−1f(x,y)ejπ(x+y)−j2π(ux/M+vy/N)MN1x=0∑M−1y=0∑N−1f(x,y)e−j2π((u−M/2)x/M+(v−N/2)y/N)F(u−M/2,v−N/2)
实际上就是将图像分成四个象限,然后将对角位置的区域互换
傅里叶谱(The Fourier Spectrum):∣F(u,v)∣
- F(0,0) 是整个图像的平均灰度,也即最低频率
- F(u,v) 在靠近(u,v)=(0,0)附近包含了低频信息:代表的是灰度变化缓慢的光滑区域
- 距离(u,v)=(0,0) 越远,其频率越大
- F(u,v)在远离(u,v)=(0,0)区域包含了高频信息:代表的是灰度变化剧烈的区域,如边缘
通过移中操作将频率域的低频信息移到图像中央
快速傅里叶变换
(离散)傅里叶变换的复杂度,对长度为 M 的信号,总共需要 M2 次求和运算和乘法运算。
快速傅里叶变换(FFT)只需要 Mlog2M 次运算。
FFT算法基本思想:基于逐次加倍(successive doubling)的方法,通过推导将原始傅里叶转换成两个递推公式。
F(u)=M1∑x=0M−1f(x)e−j2πux/M,u=0,1,2,…,M−1
{F(u)=21[Feven(u)+Fodd(u)W2Ku]F(u+K)=21[Feven(u)−Fodd(u)W2Ku]u=0,1,2,…,M−1
其中,M=2K,WM=e−j2π/M,Feven(u),Fodd(u) 分别是偶数和奇数位置上 K 个点的傅里叶值
频率域的图像滤波
卷积理论
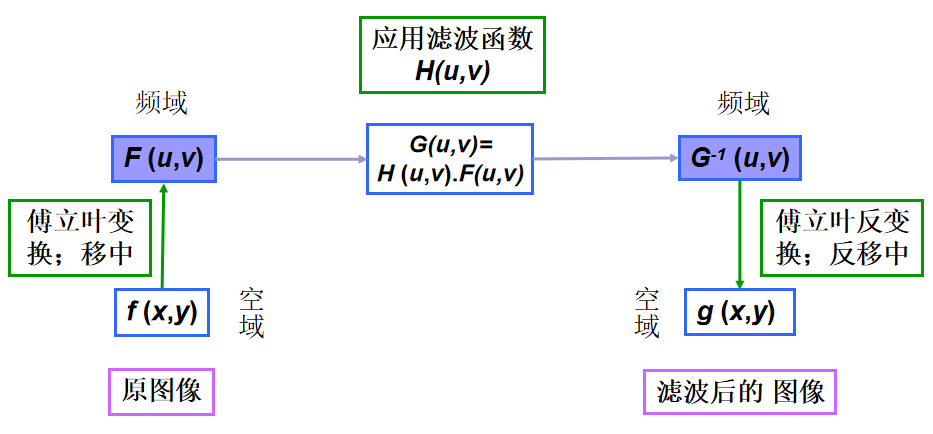
傅里叶变换对的卷积理论:
空域上的卷积等价于频域上的乘积
频域上的卷积等价于空域上的乘积
空域和频域的滤波函数也构成傅里叶变换对,利用该性质可以在频域上设计滤波器,再转换到空域进行实现(通常效率更高)
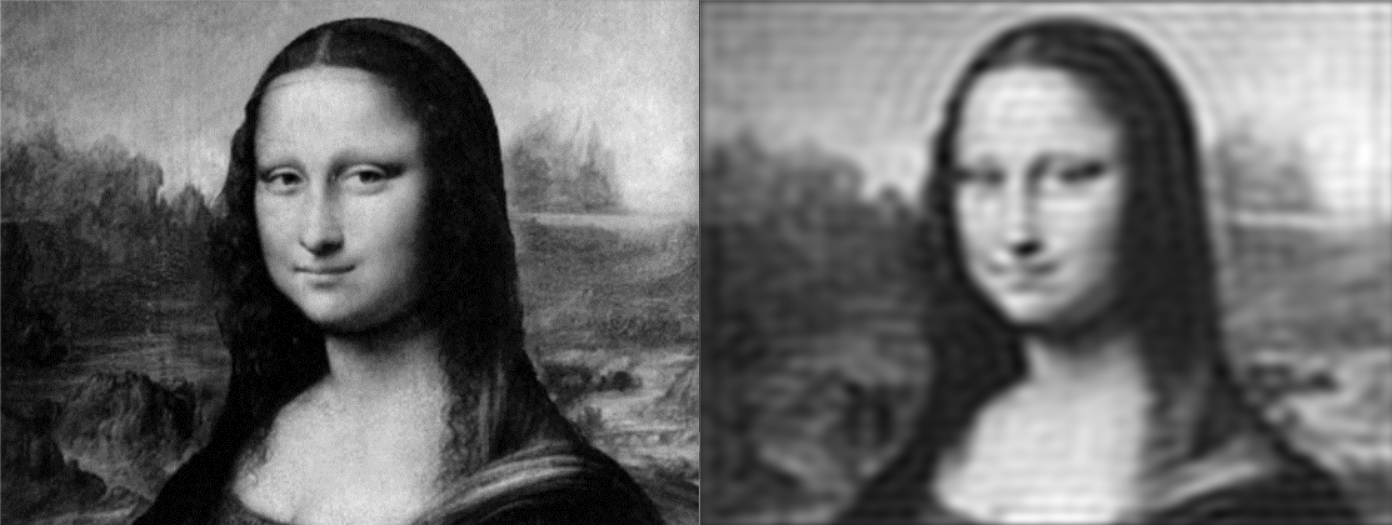
振铃现象:对一幅图像进行滤波处理,若选用的频域滤波器具有陡峭的变化,则会使滤波图像产生“振铃”,所谓“振铃”,就是指输出图像的灰度剧烈变化处产生的震荡,就好像钟被敲击后产生的空气震荡。
出现的原因:接近窗函数的滤波器,逆傅里叶变换之后,其空域函数两边的余波将对图像产生振铃现象。